VRA: Grounding Discrete-Time Joint Acceleration in Voltage-Constrained Actuation
arXiv Supplementary Code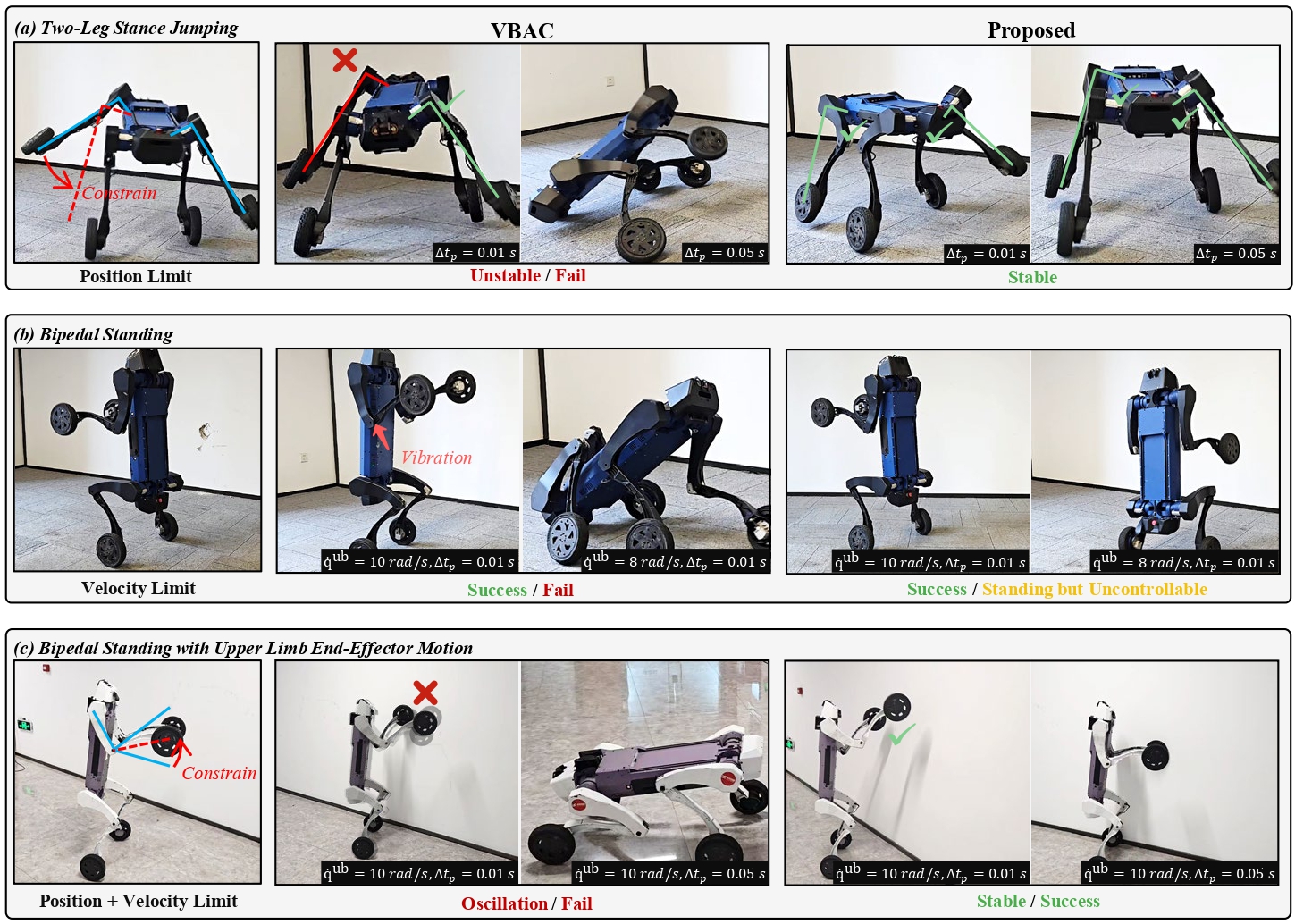
Abstract
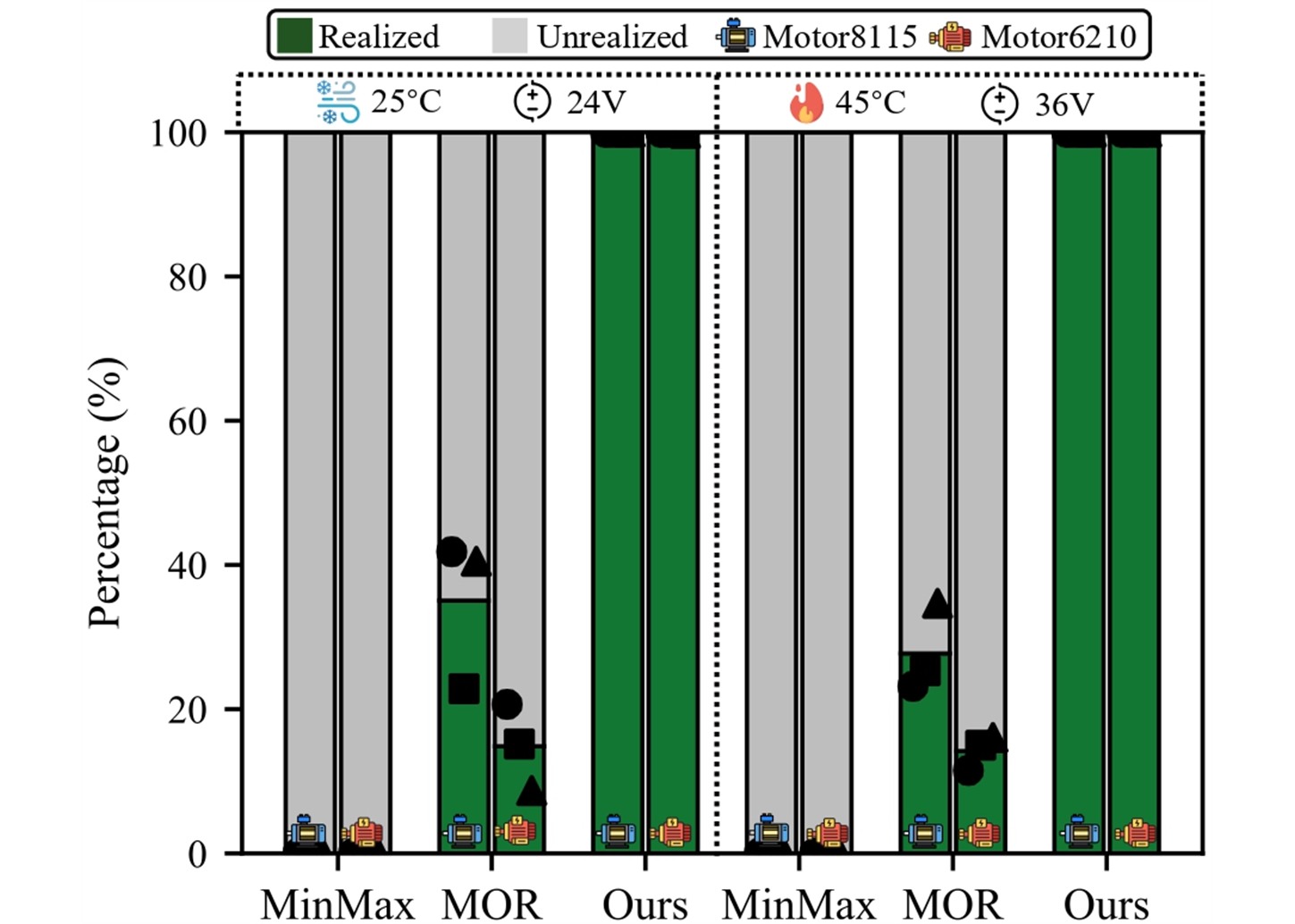
Discrete-time joint acceleration constraints are widely used to enforce position and velocity limits. However, under voltage-constrained electric actuators, kinematically admissible accelerations may be physically unrealizable, exposing a missing execution-level abstraction. We propose Voltage-Realizable Acceleration (VRA), a joint-level acceleration interface that grounds kinematic acceleration in voltage-constrained actuator physics by restricting commanded accelerations to voltage-realizable constraints. Hardware experiments on electric actuators and a wheel-legged quadruped show that VRA removes unrealizable accelerations, restores consistent near-constraint execution, and reduces constraint-induced oscillations.
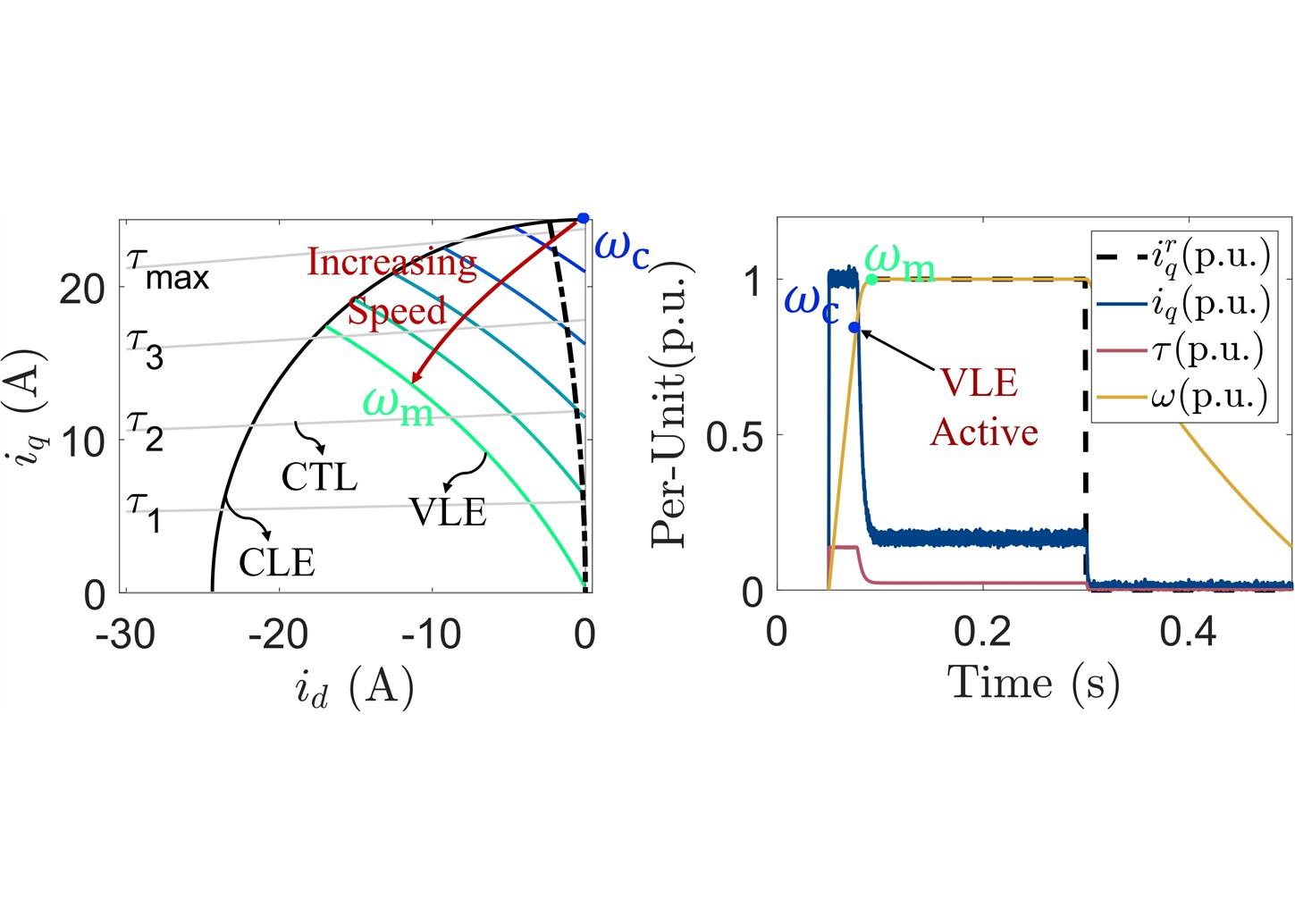
Surface-Mounted Permanent Magnetic Synchronous Motor Physics

Customized 8115 Motor
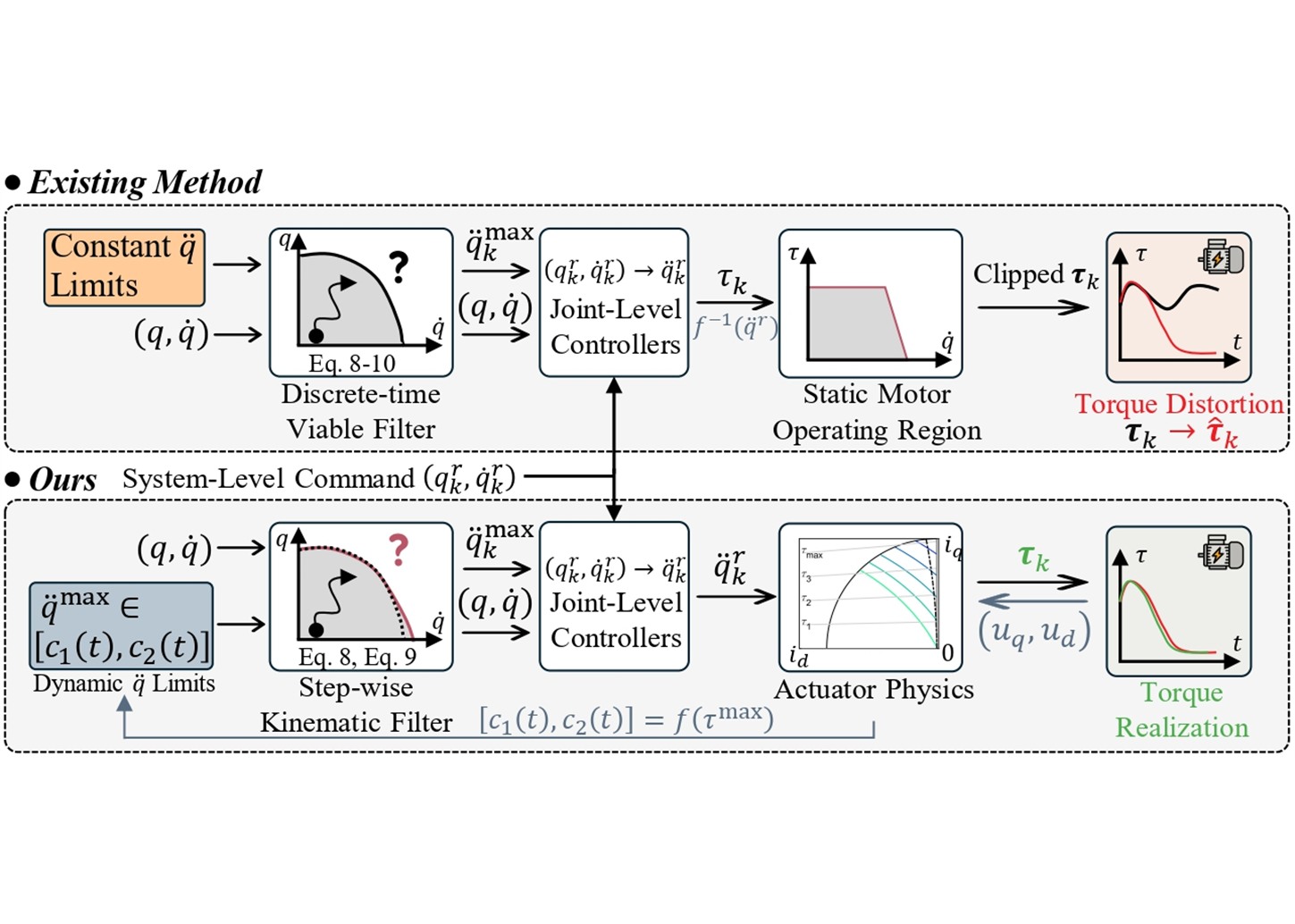
Proposed Method
Guarantee Voltage Realizability
Video Presentations
Hardware Experiments on Actuators and Wheel-leg Quadruped Robot
Customized Actuators and Robots
BibTeX
@inproceedings{zhang2026vra,
title={VRA: Grounding Discrete-Time Joint Acceleration in Voltage-Constrained Actuation},
author={Lingwei Zhang, Jiaming Wang, Tianlin Zhang, Zhitao Song, Xuanqi Zeng, Weipeng Xia, Zhongyu Li, Yun-hui Liu},
booktitle={Robotics: Science and Systems},
year={2026}
}